



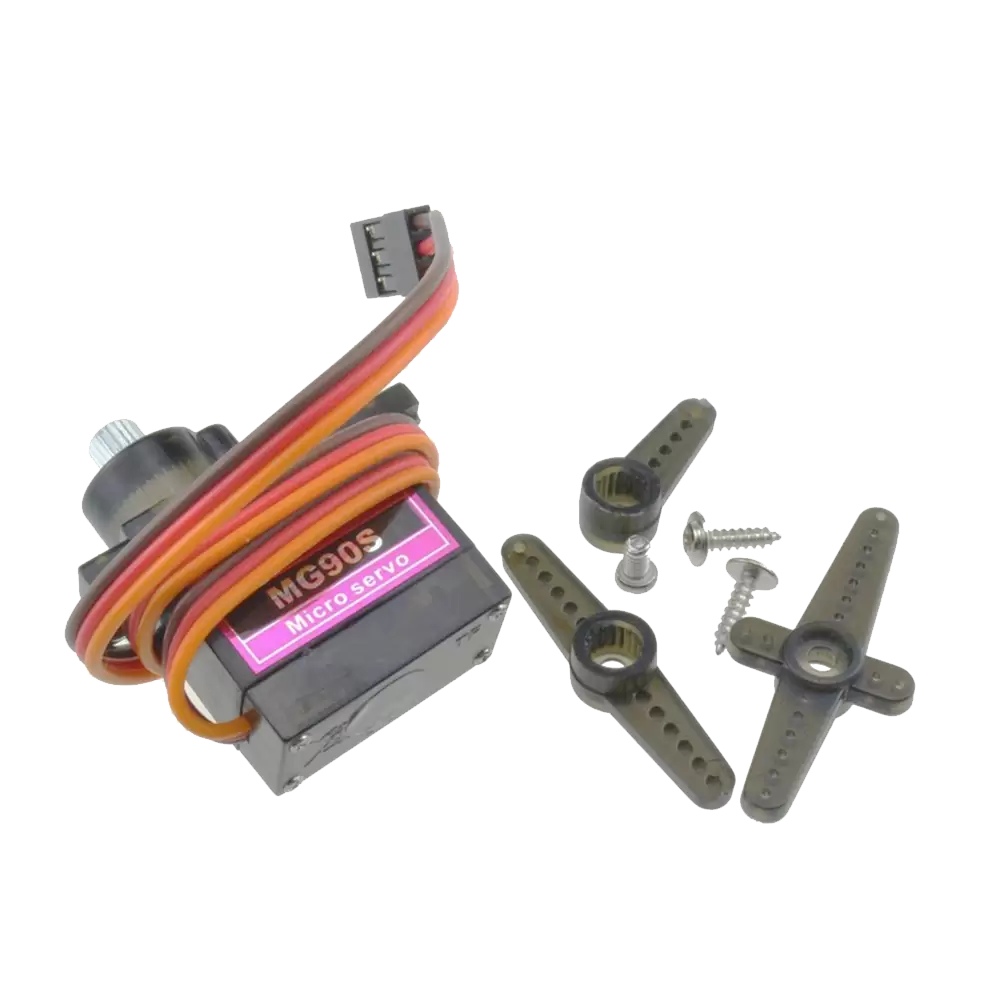







Este es un micro servomotor que tiene engranajes metálicos y es prácticamente pequeño, lo pueden utilizar donde requieran un movimiento angular controlado, como un brazo robótico que requiere que sus eslabones se puedan mover angular-mente y mantengan la posición, la ventaja de su tamaño ayuda a realizar pequeños proyectos.
Un servomotor (o servo) es un tipo especial de motor con características especiales de control de posición. Al hablar de un servomotor se hace referencia a un sistema compuesto por componentes electromecánicos y electrónicos.
El motor en el interior de un servomotor es un motor DC común y corriente. El eje del motor se acopla a una caja de engranajes similar a una transmisión. Esto se hace para potenciar el torque del motor y permitir mantener una posición fija cuando se requiera. De forma similar a un automóvil, a menor mayor velocidad, menor torque. El circuito electrónico es el encargado de manejar el movimiento y la posición del motor.
| Voltaje de operación | 4.8V - 6.0V | |
| Torque | 4.8V | 2.2 Kg.cm |
| 6.0V | 2.5 Kg.cm | |
| Velocidad | 4.8V | 0.11 sec/60° |
| 6.0V | 0.10 sec/60° | |
| Tipo de engrane | Metálico | |
| Rango de rotación | 180° | |
| Ciclo de pulsos | 20 ms | |
| Ancho de pulso | 400-2400 µs | |
| Característica | |
|---|---|
| Largo | 2.31 cm |
| Ancho | 1.22 cm |
| Alto | 2.9 cm |
| Peso | 14 gr |